
可編程控制器(programmable controller)是計算機家族中的一員,是為產業控制應用而設計制造的。早期的可編程控制器稱作可編程邏輯控制器(programmable logic controller),簡稱,它主要用來代替實現邏輯控制。隨著技術的發展,這種裝置的功能已經大大超過了邏輯控制的范圍,因此,今天這種裝置稱作可編程控制器,簡稱pc。但是為了避免與個人計算機(personal computer)的簡稱混淆,所以將可編程控制器簡稱plc。
在60年代,汽車生產流水線的自動控制系統基本上都是由繼電器控制裝置構成的。當時汽車的每一次改型都直接導致繼電器控制裝置的重新設計和安裝。隨著生產的發展,汽車型號更新的周期愈來愈短,這樣,繼電器控制裝置就需要經常地重新設計和安裝,十分費時,費工,費料,甚至阻礙了更新周期的縮短。為了改變這一現狀,美國通用汽車公司在1969年公然招標,要求用新的控制裝置取代繼電器控制裝置,并提出了十項招標指標,即:
1、編程方便,現場可修改程序;
2、維修方便,采用模塊化結構;
3、可靠性高于繼電器控制裝置;
4、體積小于繼電器控制裝置;
5、數據可直接送進治理計算機;
6、本錢可與繼電器控制裝置競爭;
7、輸進可以是交流115v;
8、輸出為交流115v,2a以上,能直接驅動電磁閥,等;
9、在擴展時,原系統只要很小變更;
10、用戶程序存儲器容量至少能擴展到4k。
1969年,美國數字設備公司(dec)研制出第一臺plc,在美國通用汽車自動裝配線上試用,獲得了成功。這種新型的產業控制裝置以其簡單易懂,操縱方便,可靠性高,通用靈活,體積小,使用壽命長等一系列優點,很快地在美國其他產業領域推廣應用。到1971年,已經成功地應用于食品,飲料,冶金,造紙等產業。
這一新型產業控制裝置的出現,也受到了世界其他國家的高度重視。1971日本從美國引進了這項新技術,很快研制出了日本第一臺plc。1973年,西歐國家也研制出它們的第一臺plc。我國從1974年開始研制。于1977年開始產業應用。
plc問世以來,盡管時間不長,但發展迅速。為了使其生產和發展標準化,美國制造商協會nema(national electrical manufactory association)經過四年的調查工作,于1984年首先將其正式命名為pc(programmable controller),并給pc作了如下定義:
“pc是一個數字式的裝置,它使用了可編程序的記憶體儲存指令。用來執行諸如邏輯,順序,計時,計數與演算等功能,并通過數字或類似的輸進/輸出模塊,以控制各種機械或工作程序。一部數字電子計算機若是從事執行pc之功能著,亦被視為pc,但不包括鼓式或類似的機械式順序控制器。”
以后國際委員會(iec)又先后頒布了plc標準的草案第一稿,第二稿,并在1987年2月通過了對它的定義:
“可編程控制器是一種數字運算操縱的電子系統,專為在產業環境應用而設計的。它采用一類可編程的存儲器,用于其內部存儲程序,執行邏輯運算,順序控制,定時,計數與算術操縱等面向用戶的指令,并通過數字或模擬式輸進/輸出控制各種類型的機械或生產過程。可編程控制器及其有關外部設備,都按易于與產業控制系統聯成一個整體,易于擴充其功能的原則設計。”
總之,可編程控制器是一臺計算機,它是專為產業環境應用而設計制造的計算機。它具有豐富的輸進/輸出接口,并且具有較強的驅動能力。但可編程控制器產品并不針對某一具體產業應用,在實際應用時,其硬件需根據實際需要進行選用配置,其軟件需根據控制要求進行設計編制。
固然plc問世時間不長,但是隨著微處理器的出現,大規模,超大規模技術的迅速發展和數據通訊技術的不斷進步,plc也迅速發展,其發展過程大致可分三個階段:
1、早期的plc(60年代末—70年代中期)
早期的plc一般稱為可編程邏輯控制器。這時的plc多少有點繼電器控制裝置的替換物的含義,其主要功能只是執行原先由繼電器完成的順序控制,定時等。它在硬件上以準計算機的形式出現,在i/o接口電路上作了改進以適應產業控制現場的要求。裝置中的器件主要采用分立元件和中小規模集成電路,存儲器采用磁芯存儲器。另外還采取了一些措施,以進步其抗干擾的能力。在軟件編程上,采用廣大電氣工程技術職員所熟悉的繼電器控制線路的方式—梯形圖。因此,早期的plc的性能要優于繼電器控制裝置,其優點包括簡單易懂,便于安裝,體積小,能耗低,有故障指使,能重復使用等。其中plc特有的編程語言—梯形圖一直沿用至今。
2、中期的plc(70年代中期—80年代中,后期)
在70年代,微處理器的出現使plc發生了巨大的變化。美國,日本,德國等一些廠家先后開始采用微處理器作為plc的中心處理單元(cpu)。
這樣,使plc得功能大大增強。在軟件方面,除了保持其原有的邏輯運算、計時、計數等功能以外,還增加了算術運算、數據處理和傳送、通訊、自診斷等功能。在硬件方面,除了保持其原有的開關模塊以外,還增加了模擬量模塊、遠程i/o模塊、各種特殊功能模塊。并擴大了存儲器的容量,使各種邏輯線圈的數目增加,還提供了一定數目的數據寄存器,使plc得應用范圍得以擴大。
3、近期的plc(80年代中、后期至今)
進進80年代中、后期,由于超大規模集成電路技術的迅速發展,微處理器的市場價格大幅度下跌,使得各種類型的plc所采用的微處理器的檔次普遍進步。而且,為了進一步進步plc的處 理速度,各制造廠商還紛紛研制開發了專用邏輯處理芯片。這樣使得plc軟、硬件功能發生了巨大變化。
plc的主要特點
1、高可靠性
(1)所有的i/o接口電路均采用光電隔離,使產業現場的外電路與plc內部電路之間電氣上隔離。
(2)各輸進端均采用r-c濾波器,其濾波時間常數一般為10~20ms.
(3)各模塊均采用屏蔽措施,以防止輻射干擾。
(4)采用性能優良的。
(5)對采用的器件進行嚴格的篩選。
(6)良好的自診斷功能,一旦電源或其他軟,硬件發生異常情況,cpu立即采用有效措施,以防止故障擴大。
(7)大型plc還可以采用由雙cpu構成冗余系統或有三cpu構成表決系統,使可靠性更進一步進步。
2、豐富的i/o接口模塊
plc針對不同的產業現場信號,如:交流或直流;開關量或模擬量;電壓或電流;脈沖或電位; 強電或等。有相應的i/o模塊與產業現場的器件或設備,如:按鈕;行程開關;接近開關;及變送器;電磁線圈;控制閥等直接連接。
另外為了進步操縱性能,它還有多種人-機對話的接口模塊; 為了組成產業局部網絡,它還有多種通訊聯網的接口模塊,等等。
3、采用模塊化結構
為了適應各種產業控制需要,除了單元式的小型plc以外,盡大多數plc均采用模塊化結構。plc的各個部件,包括cpu,電源,i/o等均采用模塊化設計,由機架及電纜將各模塊連接起來,系統的規模和功能可根據用戶的需要自行組合。
4、編程簡單易學
plc的編程大多采用類似于繼電器控制線路的梯形圖形式,對使用者來說,不需要具備計算機的專門知識,因此很輕易被一般工程技術職員所理解和把握。
5、安裝簡單,維修方便
plc不需要專門的機房,可以在各種產業環境下直接運行。使用時只需將現場的各種設備與plc相應的i/o端相連接,即可投進運行。各種模塊上均有運行和故障指示裝置,便于用戶了解運行情況和查找故障。
由于采用模塊化結構,因此一旦某模塊發生故障,用戶可以通過更換模塊的方法,使系統迅速恢復運行。
plc的功能
1、邏輯控制
2、定時控制
3、計數控制
4、步進(順序)控制
5、pid控制
6、數據控制:plc具有數據處理能力。
7、通訊和聯網
8、其它:plc還有很多特殊功能模塊,適用于各種特殊控制的要求,如:定位控制模塊,crt模塊
plc的分類
1.按照i/o點數和程序容量分類
輸入/輸出(i/o)單元是plc與被控對象間傳遞輸入/輸出信號的接口部件。輸入部件是開關、按鈕、傳感器等,輸出部件是電磁閥、接觸器、繼電器。
為了適應不同工業生產過程的應用要求,可編程序控制器能夠處理的輸入信號數量是不一樣的。一般將一路信號稱作一個點,將輸入點和輸出點數的總和稱為機器的點。按照點數的多少和程序容量,可將plc分為超小(微)、小、中、大、超大等幾種類型。
(1)小型機
小型plc的i/o點數在256點以下,存儲容量為2k步(1k= 1024,存儲一個1或0的二進制碼稱為一位,一個字為16位),具有邏輯控制、定時、計數等功能,目前的小型plc產品也具有算術運算、和模擬量處理功能。有的plc用“步”來衡量,一步占用一個地址單元,它表示plc能存放多少用戶程序。
(2)中型機
中型plc的i/o點數在256 - 2048點之間,存儲容量為2-8k步,具有邏輯運算、算術運算、數據傳送、中斷、數據通信、模擬量處理等功能,用于多種開關量、多通道模擬量或數字量與模擬量混合控制的復雜控制系統。
(3)大型機
大型plc的i/o點數在2048點以上,存儲容量達8k步以上,具有邏輯運算、算術運算、模擬量處理、聯網通信、監視記錄、打印等功能,有中斷、智能控制、遠程控制能力,可完成大規模的過程控制,也可構成分布式控制網絡,完成整個工廠的網絡化自動控制。
2.按照硬件結構分類
根據plc的外形和硬件安裝結構的特點,可將plc分為整體式、模塊式和混合式三種。
(1)整體式結構
整體式(箱體式)結構是將plc的電源、中央處理器、輸入/輸出部件裝在一個箱體內,通常稱為基本單元。還包括整體的各個部分組成、工作方式開關、模擬電位器、i/o擴展接口、工作狀態指示和用戶程序存儲卡、i/o接線端子排及指示燈等。主機箱體外部的rs -485通信接口,用以連接編程器(手持式或pc)、文本/圖形顯示器、plc網絡等外部設備。整體結構緊湊、體積小、重量輕、價格低,但主機的i/o點數固定,使用不靈活。一般小型plc多采用這種結構,如三菱公司的fx0n、fx1s、fx2n系列,如圖所示。
整體式plc一般還可配備特殊功能單元,如模擬量單元、位置控制單元等,使其功能得以擴展。
圖 plc整體式fx1s、fx2n系列
(2)模塊式結構
大、中型plc和部分小型plc為了擴展方便,常采用模塊式結構,plc由機架和模塊兩部分組成,模塊安插在插座上,模塊插座焊在機架總線連接板上,有不同槽數的機架供用戶選用,各機架之間用接口模塊和電纜相連。模塊式結構又叫積木式結構。模塊式結構的特點是把plc的每個工作單元都制成獨立的模塊,如cpu模塊、輸入模塊、輸出模塊、通信模塊等。另外用一塊帶有插槽的母板(實質上就是計算機總線)把這些模塊按控制系統需要選取后插到母板上,就構成了一個完整的plc。模塊式結構的plc具有配置靈活、組裝方便、擴展容易的優點,其缺點是結構較復雜、體積比較大、造價也較高。一般大、中型plc都采用這種結構,如三菱q系列plc。
(3)混合式plc
混合式結構將整體式結構和模塊式結構的特點相結合。把某個系列的plc工作單元的外形都制作成一致的外觀尺寸,cpu、i/o口及電源也可做成獨立的,不使用模塊式plc中的母板,采用電纜連接各個單元,在控制設備中安裝時可以一層層地疊裝,就成了混合式plc。不但系統可以靈活配置,還可做得體積小巧。
任意構成某種形式的疊裝式plc即混合式plc,在plc智能化發展后使用非常廣泛。
3.按照plc功能的強弱分類
按照plc功能的強弱分為低檔機、中檔機、高檔機三種。
低檔plc具有邏輯運算、定時、計數等基本功能。有的還增設了模擬量的處理、算術運算、數據傳送等功能,可以實現邏輯、順序、計時、計數等控制。主要用于邏輯控制、順序控制或少量模擬量控制的單機控制系統。
中檔plc除了具有低檔機的功能外,還具有較強的模擬量輸入/輸出、算術運算、數據傳送、通信聯網等功能,可完成既有開關量又有模擬量的控制任務。有些還可增設中斷控制、pid控制等功能,適用于復雜控制系統。
高檔plc除具有中檔機的功能外,增設帶符號算術運算、矩陣運算等功能,使其運算能力提高。高檔機還具有模擬調節、聯網通信、監視、記錄和打印等功能,使plc的功能更多更強,能進行遠程控制和大規模過程控制,構成。
多年來,可編程控制器(以下簡稱plc)從其產生到現在,實現了接線邏輯到存儲邏輯的奔騰;其功能從弱到強,實現了邏輯控制到數字控制的進步;其應用領域從小到大,實現了單體設備簡單控制到勝任運動控制、過程控制及集散控制等各種任務的跨越。今天的plc在處理模擬量、數字運算、人機接口和網絡的各方面能力都已大幅進步,成為產業控制領域的主流控制設備,在各行各業發揮著越來越大的作用。
plc的應用領域
目前,plc在國內外已廣泛應用于鋼鐵、石油、化工、、建材、、汽車、輕紡、交通運輸、環保及文化娛樂等各個行業,使用情況主要分為如下幾類:
1.開關量邏輯控制
取代傳統的繼電器電路,實現邏輯控制、順序控制,既可用于單臺設備的控制,也可用于多機群控及自動化流水線。如注塑機、印刷機、訂書機械、組合機床、磨床、包裝生產線、電鍍流水線等。
2.產業過程控制
在產業生產過程當中,存在一些如溫度、壓力、流量、液位和速度等連續變化的量(即模擬量),plc采用相應的a/d和d/a轉換模塊及各種各樣的控制算法程序來處理模擬量,完成閉環控制。pid調節是一般閉環控制系統中用得較多的一種調節方法。過程控制在冶金、化工、熱處理、鍋爐控制等場合有非常廣泛的應用。
3.運動控制
plc可以用于圓周運動或直線運動的控制。一般使用專用的運動控制模塊,如可驅動或的單軸或多軸位置控制模塊,廣泛用于各種機械、機床、機器人、等場合。
4.數據處理
plc具有數學運算(含矩陣運算、函數運算、邏輯運算)、數據傳送、數據轉換、排序、查表、位操縱等功能,可以完成數據的采集、分析及處理。數據處理一般用于如造紙、冶金、食品產業中的一些大型控制系統。
5.通訊及聯網
plc通訊含plc間的通訊及plc與其它智能設備間的通訊。隨著工廠自動化網絡的發展,現在的plc都具有通訊接口,通訊非常方便。
plc應用中需要留意的題目
plc是一種用于產業生產自動化控制的設備,一般不需要采取什么措施,就可以直接在產業環境中使用。然而,盡管有如上所述的可靠性較高,抗干擾能力較強,但當生產環境過于惡劣,電磁干擾特別強烈,或安裝使用不當,就可能造成程序錯誤或運算錯誤,從而產生誤輸進并引起誤輸出,這將會造成設備的失控和誤動作,從而不能保證plc的正常運行,要進步plc控制系統可靠性,一方面要求plc生產廠家進步設備的抗干擾能力;另一方面,要求設計、安裝和使用維護中引起高度重視,多方配合才能完善解決題目,有效地增強系統的抗干擾性能。因此在使用中應留意以下題目:
1.工作環境
(1)溫度
plc要求環境溫度在0~55oc,安裝時不能放在發熱量大的元件下面,四周透風散熱的空間應足夠大。
(2)濕度
為了保證plc的盡緣性能,空氣的相對濕度應小于85%(無凝露)。
(3)震動
應使plc闊別強烈的震動源,防止振動頻率為10~55hz的頻繁或連續振動。當使用環境不可避免震動時,必須采取減震措施,如采用減震膠等。
(4)空氣
避免有腐蝕和易燃的氣體,例如氯化氫、硫化氫等。對于空氣中有較多粉塵或腐蝕性氣體的環境,可將plc安裝在封閉性較好的控制室或控制柜中。
(5)電源
plc對于電源線帶來的干擾具有一定的抵制能力。在可靠性要求很高或電源干擾特別嚴重的環境中,可以安裝一臺帶屏蔽層的隔離變壓器,以減少設備與地之間的干擾。一般plc都有直流24v輸出提供給輸進端,當輸進端使用外接直流電源時,應選用直流穩壓電源。由于普通的整流濾波電源,由于紋波的影響,輕易使plc接收到錯誤信息。
2.控制系統中干擾及其來源
現場電磁干擾是plc控制系統中最常見也是最易影響系統可靠性的因素之一,所謂治標先治本,找出題目所在,才能提出解決題目的辦法。因此必須知道現場干擾的源頭。(1)干擾源及一般分類
影響plc控制系統的干擾源,大都產生在電流或電壓劇烈變化的部位,其原因是電流改變產生磁場,對設備產生電磁輻射;磁場改變產生電流,電磁高速產生電磁波。通常電磁干擾按干擾模式不同,分為共模干擾和差模干擾。共模干擾是信號對地的電位差,主要由電網串進、地電位差及空間電磁輻射在信號線上感應的共態(同方向)電壓疊加所形成。共模電壓通過不對稱電路可轉換成差模電壓,直接影響測控信號,造成損壞(這就是一些系統i/o模件損壞率較高的主要原因),這種共模干擾可為直流,亦可為交流。差模干擾是指作用于信號兩極間的干擾電壓,主要由空間電磁場在信號間耦合感應及由不平衡電路轉換共模干擾所形成的電壓,這種干擾疊加在信號上,直接影響丈量與控制精度。
(2)plc系統中干擾的主要來源及途徑
強電干擾
plc系統的正常供電電源均由電網供電。由于電網覆蓋范圍廣,它將受到所有空間電磁干擾而在線路上感應電壓。尤其是電網內部的變化,刀開關操縱浪涌、大型電力設備起停、交直流傳動裝置引起的諧波、電網短路暫態沖擊等,都通過輸電線路傳到電源原邊。
柜內干擾
控制柜內的高壓電器,大的電感性負載,混亂的布線都輕易對plc造成一定程度的干擾。
來自信號線引進的干擾
與plc控制系統連接的各類信號傳輸線,除了傳輸有效的各類信息之外,總會有外部干擾信號侵進。此干擾主要有兩種途徑:一是通過變送器供電電源或共用信號儀表的供電電源串進的電網干擾,這往往被忽視;二是信號線受空間電磁輻射感應的干擾,即信號線上的外部感應干擾,這是很嚴重的。由信號引進干擾會引起i/o信號工作異常和丈量精度大大降低,嚴重時將引起元器件損傷。
來自接地系統混亂時的干擾
接地是進步電子設備電磁兼容性(emc)的有效手段之一。正確的接地,既能抑制電磁干擾的影響,又能抑制設備向外發出干擾;而錯誤的接地,反而會引進嚴重的干擾信號,使plc系統將無法正常工作。
來自plc系統內部的干擾
主要由系統內部元器件及電路間的相互電磁輻射產生,如邏輯電路相互輻射及其對模擬電路的影響,模擬地與邏輯地的相互影響及元器件間的相互不匹配使用等。
干擾
一是變頻器啟動及運行過程中產生諧波對電網產生傳導干擾,引起電網電壓畸變,影響電網的供電質量;二是變頻器的輸出會產生較強的電磁輻射干擾,影響周邊設備的正常工作。
3.主要抗干擾措施
(1)電源的公道處理,抑制電網引進的干擾
對于電源引進的電網干擾可以安裝一臺帶屏蔽層的變比為1:1的隔離變壓器,以減少設備與地之間的干擾,還可以在電源輸進端串接lc濾波電路。如圖1所示
(2)安裝與布線
● 動力線、控制線以及plc的電源線和i/o線應分別配線,隔離變壓器與plc和i/o之間應采用雙膠線連接。將plc的io線和大功率線分開走線,如必須在同一線槽內,分開捆扎交流線、直流線,若條件答應,分槽走線最好,這不僅能使其有盡可能大的空間間隔,并能將干擾降到最低限度。
● plc應闊別強干擾源如電焊機、大功率硅整流裝置和大型動力設備,不能與高壓電器安裝在同一個開關柜內。在柜內plc應闊別動力線(二者之間間隔應大于200mm)。與plc裝在同一個柜子內的電感性負載,如功率較大的繼電器、接觸器的線圈,應并聯rc消弧電路。
● plc的輸進與輸出最好分開走線,開關量與模擬量也要分開敷設。模擬量信號的傳送應采用屏蔽線,屏蔽層應一端或兩端接地,接地電阻應小于屏蔽層電阻的1/10。
● 交流輸出線和直流輸出線不要用同一根電纜,輸出線應盡量闊別高壓線和動力線,避免并行。
(3)i/o真個接線
輸進接線
● 輸進接線一般不要太長。但假如環境干擾較小,電壓降不大時,輸進接線可適當長些。
● 輸進/輸出線不能用同一根電纜,輸進/輸出線要分開。
● 盡可能采用常開觸點形式連接到輸進端,使編制的梯形圖與繼電器原理圖一致,便于閱讀。
輸出連接
● 輸出端接線分為獨立輸出和公共輸出。在不同組中,可采用不同類型和電壓等級的輸出電壓。但在同一組中的輸出只能用同一類型、同一電壓等級的電源。
● 由于plc的輸出元件被封裝在印制電路板上,并且連接至端子板,若將連接輸出元件的負載短路,將燒毀印制電路板。
● 采用繼電器輸出時,所承受的電感性負載的大小,會影響到繼電器的使用壽命,因此,使用電感性負載時應公道選擇,或加隔離繼電器。
● plc的輸出負載可能產生干擾,因此要采取措施加以控制,如直流輸出的續流管保護,交流輸出的阻容吸收電路,晶體管及雙向晶閘管輸出的旁路電阻保護。
(4)正確選擇接地點,完善接地系統
良好的接地是保證plc可靠工作的重要條件,可以避免偶然發生的電壓沖擊危害。接地的目的通常有兩個,其一為了安全,其二是為了抑制干擾。完善的接地系統是plc控制系統抗電磁干擾的重要措施之一。
plc控制系統的地線包括系統地、屏蔽地、交流地和保護地等。接地系統混亂對plc系統的干擾主要是各個接地點電位分布不均,不同接地點間存在地電位差,引起地環路電流,影響系統正常工作。例如電纜屏蔽層必須一點接地,假如電纜屏蔽層兩端a、b都接地,就存在地電位差,有電流流過屏蔽層,當發生異常狀態如雷擊時,地線電流將更大。
此外,屏蔽層、接地線和大地有可能構成閉合環路,在變化磁場的作用下,屏蔽層內又會出現感應電流,通過屏蔽層與芯線之間的耦合,干擾信號回路。若系統地與其它接地處理混亂,所產生的地環流就可能在地線上產生不等電位分布,影響plc內邏輯電路和模擬電路的正常工作。plc工作的邏輯電壓干擾容限較低,邏輯地電位的分布干擾輕易影響plc的邏輯運算和數據存貯,造成數據混亂、程序跑飛或死機。模擬地電位的分布將導致丈量精度下降,引起對信號測控的嚴重失真和誤動作。
初學plc梯形圖編程,應要遵循一定的規則,并養成良好的習慣。下面以三菱fx系列plc為例,簡單介紹一下plc梯形圖編程時需要遵循的規則,希望對大家有所幫助。有一點需要說明的是,本文雖以為例,但這些規則在其它時也可同樣遵守。
一,梯形階梯都是始于左母線,終于右母線(通常可以省掉不畫,僅畫左母線)。每行的左邊是接點組合,表示驅動邏輯線圈的條件,而表示結果的邏輯線圈只能接在右邊的母線上。接點不能出現在線圈右邊。如下圖(a)應改為(b):

二,接點應畫在水平線上,不應畫在垂直線上,如下圖(a)中的接點x005與其它接點間的關系不能識別。對此類橋式電路,應按從左到右,從上到下的單向性原則,單獨畫出所有的去路。如圖(b)所示:

三,并聯塊串聯時,應將接點多的去路放在梯形圖左方(左重右輕原則);串聯塊并聯時,應將接點多的并聯去路放在梯形圖的上方(上重下輕的原則)。這樣做,程序簡潔,從而減少指令的掃描時間,這對于一些大型的程序尤為重要。如下圖所示:

四,不宜使用雙線圈輸出。若在同一梯形圖中,同一組件的線圈使用兩次或兩次以上,則稱為雙線圈輸出或線圈的重復利用。雙線圈輸出一般梯形圖初學者容易犯的毛病之一。在雙線圈輸出時,只有最后一次的線圈才有效,而前面的線圈是無效的。這是由plc的掃描特性所決定的。
plc的cpu采用循環掃描的工作方式。一般包括五個階段(如圖所示):內部診斷與處理,與外設進行通訊,輸入采樣,用戶程序執行和輸出刷新。當方式開關處于stop時,只執行前兩個階段:內部診斷與處理,與外設進行通訊。

1,輸入采樣階段
plc順序讀取每個輸入端的狀態,并將其存入到我們稱之為輸入映像寄存器的內在單元中。當進入程序執行階段,如輸入端狀態發生改變.輸入映象區相應的單元信息并不會跟著改變,只有在下一個掃描周期的輸入采樣階段,輸入映象區相應的單元信息才會改變。因此,plc會忽視掉小于掃描周期的輸入端的開關量的脈沖變化。
2,程序執行階段
plc從程序0步開始,按先上后下,先左后右的順序掃描用戶程序并進行邏輯運算。plc按輸入映象區的內容進行邏輯運算,并把運算結果寫入到輸出映象區,而不是直接輸出到端子。
3,輸出刷新階段
plc根據輸出映象區的內容改變輸出端子的狀態。這才是plc的實際輸出。
以上簡單說明了plc的工作原理,下面我們再以實例說明為什么編寫梯形圖程序,不宜重復使用線圈。如下圖所示,設輸入采樣時,輸入映象區中x001=on,x002=off,y003-on,y004=on被實際寫入到輸出映象區。但繼續往下執行時,因x002=off,使y003=off,這個后入為的結果又被寫入輸出映象區,改變原y003的狀態。所以在輸出刷新階段,實際外部輸出y003=off,y004=on。許多新手就碰到過這樣的問題,為什么x001已經閉合了,而y003沒有輸出呢?邏輯關系不對。其實就是因為雙線圈使用造成的。

注意:我們所說的是不宜(最好不要)使用雙線圈,雙線圈使用并不是絕對禁止的,在一些特殊的場合也可以使用雙線圈,這時就需要你有較豐富的編程經驗和技巧了。下面我們會談到這一點。但對于初學者還是不要冒這個險。其實,從以上的例子可以看出,重復利用線圈之所以會造成y003的輸出混亂,是由于程序是從上到下順序執行的緣故造成的。但如果我們可以改變程序執行的順序,保證在任何時刻兩個線圈只有一個驅動邏輯發生,就可以使用雙線圈。其中,最常用的方法就是使用跳轉指令。如下圖所示:

程序分析:m0閉合,程序跳至p0處(不執行x001語句),m0常閉斷開,cjp1不會發生,執行下一語句。此時,y003將x002狀態進行驅動。m0斷開時,程序順序執行并按x001的狀態對t003進行驅動,m0常閉閉合,跳至p1按x003狀態對y004進行驅動,即跳過了x002驅動y003的語句。可見,在同一時刻,y003驅動只有一個可以發生。此時,雙線圈利用是可以的。
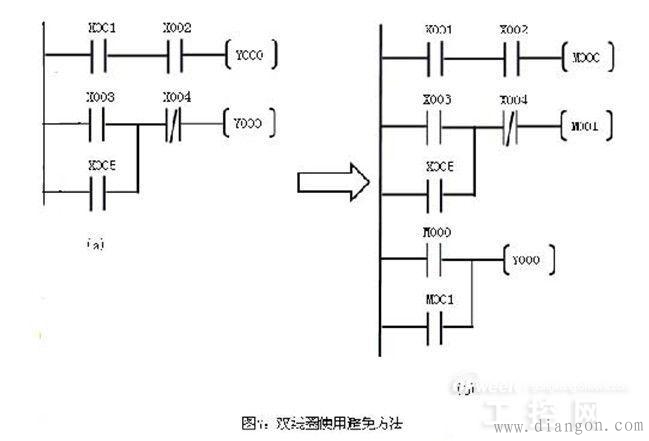
但在梯形圖編程時,我們還是要盡量避免使用雙線圈,而引入輔助繼電器是一個常用的方法。如下圖所示:
圖(b)中,x001和x002接點控制輔助繼電器m000,x003~x005接點控制輔助繼電器m001,再由兩個繼電器m000,m001接點的并聯組合去控制線圈y000。這樣邏輯關系沒變,卻把雙線圈變成單線圈。








